One of the most common crashes today happens when the driver overreacts and overcorrects the steering wheel. What should have been a simple emergency lane change turns into a “tank slapper” where the vehicle careens across all lanes as the stability control system and driver fight to regain control. One solution to this problem is controlling the amount of steering input.
Most vehicles with electric power steering can control driver input by increasing the effort required to turn the wheel to prevent an overcorrection during a electronic stability control event. But the steering ratio is fixed.
To avoid a tank slapper, it might make sense to install a very slow ratio steering rack. But this would require a lot of motion in the steering wheel to turn or park.
The first attempt at variable-ratio steering was in 1997 with the Honda Variable Gear Ratio Rack on some Japanese models. At the center of the rack, the space between the teeth was smaller and the space became larger as the pinion moved down the rack. In the middle of the rack was a higher ratio and the ratio became lower as the steering wheel was turned toward lock. This made the steering less sensitive when the steering wheel was close to its center position. But as the steering was turned towards the stops, the ratio would quicken.
In the past five years, Audi and other manufacturers have introduced and experimented with variable-ratio steering systems as more and more steering systems have become electric. In 2016, Ford introduced the adaptive steering system on the Edge and today is using the technology on several vehicles including the Ford F-150 Super-Duty.
The adaptive system dynamically changes the steering ratio between the steering wheel and the road wheels. This is done with a motor, worm gear and toothed. All adaptive steering system components are inside the steering wheel, behind the airbag.
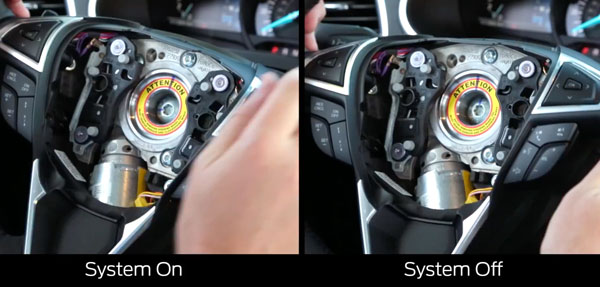
The steering effort control module (SECM) controls the motor that changes the position of the variable-ratio mechanism. The changes to the ratio occur quickly. The primary inputs are steering position, torque and vehicle dynamics.
SECM communicates with many modules. The steering angle sensor module (SASM) and power steering control module (PSCM) inputs are used to sense inputs from the driver. The ABS module monitors vehicle dynamics. Other inputs like data from the imaging processing module A (IPMA) is used during lane departure corrections.
The adaptive steering system is designed with a locking device. While the lock is engaged, the steering system is set to a fixed (1:1) steering ratio. A sound may be heard when the vehicle is started or shut off as the lock is disengaged or engaged and a slight movement of the steering wheel may be noticed while the locking action is taking place.
If the vehicle loses electrical power or the SECM detects a fault while driving, the lock is engaged. Extreme operating conditions may also cause the SECM to engage the lock. This strategy prevents overheating and permanent damage to the adaptive steering system.
Typical steering and driving maneuvers allow the system to cool and return to normal operation.
While the lock is engaged, it is possible the steering wheel may not be straight when the vehicle is driving straight ahead and the driver may notice the steering wheel angle might be off-set.
The locking solenoid also engages when the ignition is set to ON and the driver’s door is closed, this prevents the steering wheel from turning unnecessarily while the system is off. The locking solenoid disengages once the engine is started.
Variable-ratio steering is coming and will add a new wrinkle to steering system diagnostics.